

Hongbao
Automated parcel retrieval robot

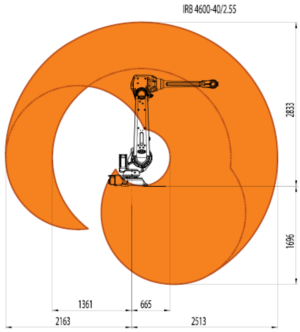
Model: IRB4600-40/2.55;
Wrist Payload: 40kg;
Maximum Reach: 2550mm;
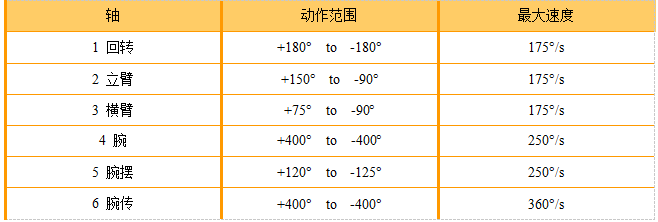
Axes: 6;
Protection Class: IP67;
Mounting Style: Floor mounting / Tilt mounting / Inverted mounting;
Performance Indicators
Repeatability: 0.06mm;
Working Range
Workflow
Step 1: The robot waits at the standby position on the injection molding machine mold. After the injection molding machine is fully opened, it enters the mold and picks up the part on the moving mold side;
Step 2: After the robot completes the picking, it returns to the standby position outside the mold and allows the injection molding machine to close the mold;
Step 3: The robot moves to the part placement position outside the mold to place the part. After completion, it returns to the standby position on the injection molding machine mold;
Previous Page
Next Page