

Hongbao
CNC machine tool loading and unloading
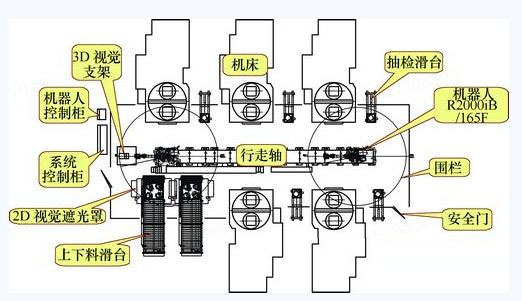
This system uses one robot to serve five machine tools for loading and unloading operations. The system description is as follows:
(1) One FANUC R-2000iB/165F robot: Installed on a traversing axis to achieve the loading and unloading actions of the entire system.
(2) One robot gripper: A gripper developed based on a robot-specific gripper unit, which is very suitable for situations with inconsistent workpieces and has the advantages of high positioning accuracy and gripping stability, high positioning accuracy, good durability, and easy maintenance.
(3) One 11m long traversing axis: An industrial robot is installed on the traversing axis guide rail, with a maximum speed of 1.5m/s. It is driven by a FANUC servo motor and has the characteristics of high repeat positioning accuracy, fast response speed, stable and reliable operation. A dust cover is specially designed to protect the guide rail, linear bearings, and gear components, greatly improving reliability and service life. In practical applications, the guide rail is installed on the center line of two production line machine tools, and the movement range of the installed industrial robot completely covers five machine tools and the loading and unloading slide table area. This achieves the loading and unloading operation of one robot serving five machine tools.

(4) Two loading and unloading slide tables: Each loading and unloading slide table has four trays, and each tray can hold one workpiece. It realizes the loading of workpieces to be processed and the unloading of finished workpieces. In this system, due to the use of vision technology, the loading and unloading slide tables do not require workpiece positioning devices.
(5) 2DV vision system: This vision system uses a 2D camera installed on the gripper to collect visual data. This vision system serves as a positioning method for accurately grasping the workpiece to be processed, eliminating the mechanical pre-positioning fixture usually required to ensure accurate robot grasping. It has high flexibility, making it very easy to achieve mixed production of multiple products on the machining center.
(6) 3DL vision system: This vision system uses a 3D Laser Sensor installed on the ground to collect visual data. This vision system solves the problem of changes in the loading position of workpieces with deviations in the positioning surface. Since the workpieces to be processed are blanks, the position of the loading positioning holes will change after the robot grasps the workpiece, and even the flatness of the workpiece during loading will change. This technology can automatically compensate for position changes, achieving high-precision loading.
(7) Five inspection slide tables: There is an inspection slide table for each machine tool to realize the detection of the workpiece processing quality of the machine tool at any time.
(8) Electrical control system: The human-machine interface is used to monitor the operation status of the entire system. A controller and industrial fieldbus are used to transmit real-time and non-real-time data in the system, with high reliability and maintainability. Safety devices use door switches as safety protection for the robot's working area, completely achieving human-machine isolation and ensuring personnel safety during automatic operation.
Previous Page
Next Page