

Hongbao
3D vision-guided robotic picking and placing of auto parts

Project Background
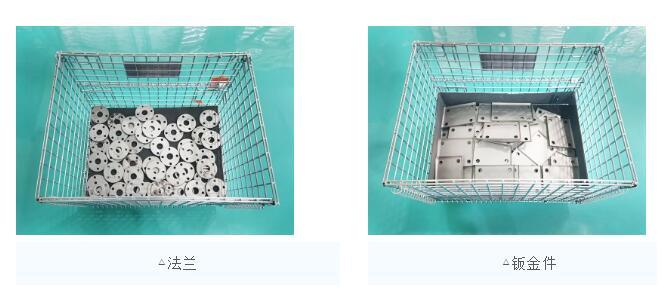
The upgrading and technological iteration of the automotive industry has led to a large number of automation needs in various aspects such as automotive parts production, assembly, and full-process quality inspection. The automotive manufacturing industry is actively seeking new production models and technologies. To achieve more flexible and intelligent production processes, higher flexibility is required for robot front-end material positioning. Robots need to quickly and accurately identify the state of disordered materials and perform picking and loading.
Solution
To achieve more flexible and intelligent production processes, higher flexibility is required for robot front-end material positioning. Robots need to quickly and accurately identify the state of disordered materials and perform picking and loading.
Project Advantages
1. Replaces manual labor, improving production efficiency;
2. High-precision 3D visual positioning, fast collision detection algorithm, intelligent robotic arm trajectory planning algorithm, picking success rate up to 99%;
3. The system can operate stably for 24 hours, achieving high-speed, high-efficiency, and high-quality automated production.
Previous Page
Next Page